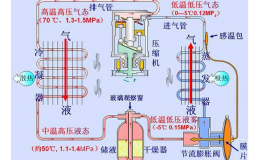
工作原理
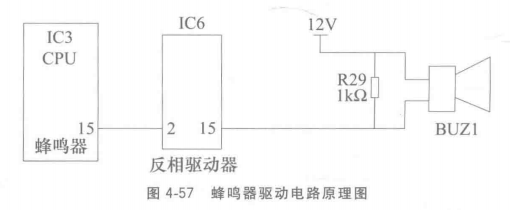
蜂鸣器驱动电路原理图见图4-57,电路作用是CPU接收到遥控信号且已处理,驱动蜂鸣器发出“滴”声响一次予以提示。
CPU⑮脚是蜂鸣器控制引脚,正常时为低电平;当接收到遥控信号时引脚变为高电平,反相驱动器IC6的输入端②脚也为高电平,输出端⑮脚则为低电平,蜂鸣器发出预先录制的音乐。由于CPU输出高电平的时间很短,万用表不容易测出电压。
关键元件:蜂鸣器
外观 蜂鸣器在电路中的英文符号为BU或BZ,供电电压一般为直流12V;外观为黑色的圆往形元件, 2个引脚位于下方,中间带有较小的圆孔。
测量阻位 使用万用表电阻挡,表笔接蜂鸣器的2个引脚,实测阻值为无穷大。蜂鸣器在实际维修时损坏的概率很小。
关健元件:反相驱动器
反相驰动器常用型号为2003,实物外形和等效电路图见下图,最大输出电流500mA ;①~⑦脚为输入端,通过电限或直接连接CPU引脚;⑯~⑩脚为输出端,连接驱动负载:⑧脚接地,⑨脚为直流12V供电引脚。
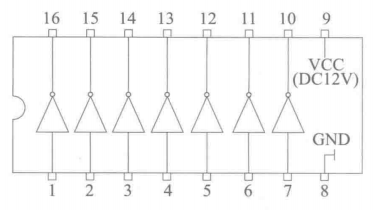
输入端(①~⑦脚)接收CPU信号,反相放大后在输出端(⑯~⑩脚)驱动负载(继电器线圈、蜂鸣器、步进电机)。所谓“反相”是指只有当输入端为高电平((2-5V),对应输出端引脚接地为约0. 7V的低电平,直流12V电压经负载线圈和反相驱动器愉出端内部接地形成回路,负载才能工作(继电器触点闭合、蜂鸣器发声、步进电机转动)。