WTZK-50型温度控制器的原理示意图如图2-8所示。波纹管输出的位移信号通过传动杆15对杠杆12产生一个顶力矩,与主调弹入3作用于杠杆的力矩在刀支架11上相平衡。当被测温度升高时,感温包1和波纹管14内压力增大,传动杆向上的顶力矩增大。当传动杆力矩大于主调弹簧的力矩时,杠杆逆时针转动,压住幅差弹簧16。若被测温度继续升高到调定值的上限,传动杆的顶力矩大于主调弹簧的拉力矩与幅差弹簧的顶力矩之和,杠杆继续转动,带动片8左移,动触头6与静触头7断开,与静触头5闭合,发温度上限信号;若被测温度下降,传动杆的顶力矩也下降,杠杆绕支点顺时针方向转动,刚转动一点,不足以使跳簧片8动作,只有被测温度降到控制器调定值的下限时,跳答片8动作,带动动触头右移,使之与静触头5断开与静触头7闭合,发温度下限信号。
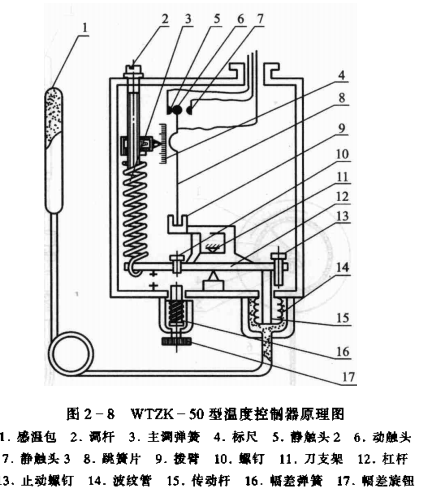
主调弹簧力的大小,决定了温度控制器的下限动作值,转动调杆2就可以改变主调弹簧的预紧力,也就是改变了控制器下限温度值。调节时指针随主调弹簧上下移动,在标尺上可以直接指示出下限温度值。
当被测温度升高,传动杆顶动杠杆逆时针转动一段距离后,便顶住了幅差弹簧,这时触点还没有变位,而杠杆要继续转动,在继续克服主调弹簧拉力矩的同时,还必须克服幅差弹簧的顶力矩,才能使触头变位。可见,转动幅差旋钮17,调节幅差弹簧16的弹力,可改变上限动作温柔值(即改变幅差)。温度调节器上限=下限值+幅差。值得注意的是,幅差旋钮上分0-10格的刻度,每格并不代表1℃,而是幅差分挡的相对数,以0为最小幅差,10为最大幅差。一般幅差可调范围为3℃-5℃。