接近觉传感器检测是否与被测物体接近以及靠近的距离和对象面的斜度,达到控制位置、探索和控制路径等。

显然,接近觉传感器越靠近对象物,则越能精确测量,故一般把接近觉传感器装在机器人手爪的前端。从而使机器人能及时发现前方的障碍物,而避免碰撞。根据接近觉传感器的制作材料和制作工艺,可分为电磁感应式、电容式、气压式以及超声波和微波式等多种。实际工作中要用哪一种传感器,则需要根据具体对象而定。例如,对象物为金属面的接近觉传感器,则一般采用电磁感应式。
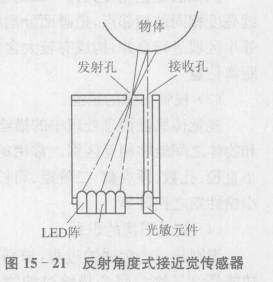
如图15-21中所示的接近觉传感器,将个发光元件沿横向直线排列(线阵),并使之按一定顺序发光,根据反射光量的变化及其时间,就可以求出发射角,从而确定被测物体的距离。